- 10.2.1
81Bestehenskriterien aus UN-Regelung Nr. 152
Die Erfüllung der in Nummer 1.1 an das Kraftfahrzeug mit autonomer Fahrfunktion gestellten Anforderungen hinsichtlich der Vermeidung von Kollisionen ist durch die Ableitung von Bestehenskriterien aus den Anforderungen der UN-Regelung Nr. 152 – Einheitliche Bedingungen für die Genehmigung von Kraftfahrzeugen hinsichtlich des Notbremsassistenzsystems (AEBS) in Fahrzeugen der Klassen M1 und N1 (ABl. L 360 vom 30.10.2020, S. 66) zu gewährleisten.
82Folgende Änderungen des Textes der UN-Regelung Nr. 152 sind dabei anzuwenden: - a)
Nummer 5.1.4 die Warnung an den Fahrer, ist nicht anzuwenden.
- b)
1Nummern 5.2.1.2 und 5.2.2.2, von der geforderten Mindestverzögerungsanforderung von 5 Metern pro Sekunde-Quadrat muss unter Berücksichtigung der Eigenschaften des Fahrzeugs im autonomen Betrieb sowie der Umgebungsbedingungen abgewichen werden.
2Beispielsweise kann bei Fahrzeugen, die während des autonomen Betriebs zum Transport von stehenden Fahrgästen vorgesehen sind, eine geringere Mindestverzögerung zum Schutz der Fahrzeuginsassen erforderlich sein.
- c)
1Nummer 5.2.1.4 Buchstabe a bis e (Einschränkungen der Anforderungen) sind nicht anzuwenden.
2Neue Einschränkungen, die sich aus der Definition der ODD ergeben, sind denkbar (beispielsweise aus „keine automatisierte Fahrt nachts“ ergibt sich die Einschränkung „bei Tageslicht“).
- d)
1Nummer 5.2.2.4 Buchstabe a ist wie folgt geändert anzuwenden:
2„Bei querenden zu Fuß Gehenden mit einer seitlichen Geschwindigkeitskomponente von nicht mehr als 7 km/h, bei querenden Rad Fahrenden mit einer seitlichen Geschwindigkeitskomponente von nicht mehr als 25 km/h“.
3Die Buchstaben b bis e sind nicht anzuwenden.
- e)
1Nummer 5.2.1.4 und 5.2.2.4, die Tabellen sind anhand der Geschwindigkeitsgrenzen der automatisierten Fahrfunktion so anzuwenden, dass über den gesamten Geschwindigkeitsbereich eine relative Kollisionsgeschwindigkeit von „0“ (keine Kollision) gefordert wird.
- f)
1Die Nummern bezüglich Übersteuerung und Abschaltung des Notbremssystems sind nicht anzuwenden.
- 10.2.2
2Verlassen des Fahrstreifens
Das Kraftfahrzeug mit autonomer Fahrfunktion darf seinen eigenen Fahrstreifen nur in folgenden Fällen verlassen:
3Während des Manövers „Fahrstreifenwechsel“, für Manövrieren im niedrigen Geschwindigkeitsbereich (beispielsweise beim Einparken, im Bereich enger Kreuzungen), zum Ausweichen bei Hindernissen und bei entgegenkommenden Fahrzeugen, zur Kollisionsvermeidung sowie um Einsatzfahrzeugen auszuweichen.
- 10.2.3
4Sicherheitsabstand
Vorausfahrende Fahrzeuge auf der Fahrspur werden erkannt.
5Es ist jederzeit, in jedem Geschwindigkeitsbereich und in jeder möglichen Fahrsituationen ein angemessener Sicherheitsabstand einzuhalten.
- 10.2.4
6Fahrstreifenwechsel anderer Fahrzeuge
Der Fahrstreifenwechsel vorausfahrender oder nachfolgender Fahrzeuge, der von einem benachbarten Fahrstreifen in den eigenen Fahrstreifen oder aus ihm heraus in einen benachbarten Fahrstreifen erfolgt, wird erkannt und bei der Fahraufgabe entsprechend berücksichtigt.
- 10.2.5
7Kollisionsvermeidung mit in gleicher Richtung fahrenden Fahrzeugen
Kollisionen mit in gleicher Richtung fahrenden, in den eigenen Fahrstreifen eindringenden Verkehrsteilnehmenden sind innerhalb der durch folgende Ungleichung bestimmten Bedingungen zu vermeiden.
8Die Ungleichung ist nur gültig für vor dem Kraftfahrzeug mit autonomer Fahrfunktion einscherende Verkehrsteilnehmende, und nur dann, wenn die einscherenden Verkehrsteilnehmer mindestens 0,72 Sekunden vor dem Eindringen sichtbar waren:
9Folgend werden die Parameter der voranstehenden Ungleichung spezifiziert: | TTCSpurwechsel | Zeit bis zum Aufprall (TTC) zum Zeitpunkt des Eindringens in den Fahrstreifen des Kraftfahrzeugs mit autonomer Fahrfunktion in Sekunden. Als Eindringen wird ein Überschreiten der Außenkante des Fahrsteifens um mehr als 30 Zentimeter gewertet. | |
| νrel | Relativgeschwindigkeit in Meter pro Sekunde [m/s]. Positiv für Annäherung des Kraftfahrzeugs mit autonomer Fahrfunktion an einen einscherenden Verkehrsteilnehmenden, der sich langsamer fortbewegt. | |
| τ | Zeit in Sekunden, die bis zum Erreichen der Verzögerung α in Meter pro Sekunde-Quadrat vergeht. | Typische Werte sind 0,5 Sekunden bis zum Erreichen von 10 Sekunde-Quadrat. Für geringere mögliche Verzögerungen des Kraftfahrzeugs mit autonomer Fahrfunktion sind die Werte entsprechend zu skalieren. Für 6 Sekunde-Quadrat wird daher davon ausgegangen, dass diese Verzögerung in 0,3 Sekunden erreicht wird, 2,4 Sekunde-Quadrat in 0,12 Sekunden. |
| τReaktion | Zeit in Sekunden, die für die Einleitung einer Bremsreaktion erforderlich ist. | 0,1 Sekunden |
| α | Verzögerung in Meter pro Sekunde-Quadrat. | 2,4 Sekunde-Quadrat für Kraftfahrzeuge mit autonomer Fahrfunktion, die für die Beförderung von stehenden oder nicht angegurteten Fahrzeuginsassen ausgelegt sind, 6 Sekunde-Quadrat für übrige Kraftfahrzeuge mit autonomer Fahrfunktion. |
Daraus ergibt sich eine geforderte Kollisionsvermeidung bei Eindringen eines Verkehrsteilnehmenden in den eigenen Fahrstreifen oberhalb der folgenden TTC-Werte (beispielhaft für Geschwindigkeiten in 10 Kilometer pro Stunde-Schritten dargestellt).
11Diese Anforderungen sind unabhängig von Umweltbedingungen zu erfüllen und sollen bei der Ableitung von Bestehenskriterien berücksichtigt werden.| vrel [Kilometer pro Stunde] | TTCSpurwechsel [Sekunde] für Kraftfahrzeuge mit autonomer Fahrfunktion mit stehend beförderten Fahrzeuginsassen | TTCSpurwechsel [Sekunde] für übrige Kraftfahrzeuge mit autonomer Fahrfunktion |
| 10 | 0,74 | 0,48 |
| 20 | 1,32 | 0,71 |
| 30 | 1,9 | 0,94 |
| 40 | 2,47 | 1,18 |
| 50 | 3,05 | 1,41 |
| 60 | 3,63 | 1,64 |
12Sollte ein fahrstreifenwechselnder Verkehrsteilnehmender bei geringerer Zeit bis zum Aufprall (TTC) in den Fahrstreifen des Kraftfahrzeugs mit autonomer Fahrfunktion einscheren, kann nicht mehr von einer Kollisionsvermeidung ausgegangen werden.
13Sofern eine Kollision nicht zu vermeiden ist, sind die Folgen einer Kollision durch Bremsen und damit möglichst großem Geschwindigkeitsabbau unter Abwägung der Gefahr für die Insassen des Kraftfahrzeugs mit autonomer Fahrfunktion aufgrund der Bremsung und der Kollision zu minimieren.
14Die Regelstrategie des Systems darf sich zwischen Kollisionsvermeidung und Kollisionsabschwächung nur insofern ändern, als eine Bremsung gegenüber einem nicht mehr erfolgreichen Ausweichmanöver priorisiert wird.
15Ausweichmanöver dürfen nur unter Beachtung der Vorgaben in Nummer 1.1 erfolgen.
- 10.2.6
16Spurwechselmanöver
Die Bestehenskriterien für Spurwechselmanöver sind der Nummer 5.6.4.6 der UN-Regelung Nr. 79 – Einheitliche Bedingungen für die Genehmigung der Fahrzeuge hinsichtlich der Lenkanlage (ABl. L 318 vom 14.12.2018, S. 1) zu entnehmen.
17Anforderungen dieser Regelung, die Funktionen betreffen, die sich auf die fahrende Person beziehen, sind nicht anzuwenden.
18Die Fahrmanöver sind so zu planen, dass keine Gefährdung von anderen am Verkehr Teilnehmenden stattfindet.
19Die Bestehenskriterien in Bezug auf sichere Spurwechsel und daran, wie eine Gefährdung anderer Verkehrsteilnehmenden beim Spurwechseln zu vermeiden ist, orientieren sich an den Anforderungen der Nummer 5.6.4.7 und 5.6.4.8 der UN-Regelung Nr. 79, wobei für die Geschwindigkeit des sich nähernden Fahrzeugs (vαρρ) die jeweilig in der ODD herrschende Geschwindigkeitsbeschränkung angesetzt werden darf.
- 10.2.7
20Einbiegen und Kreuzen
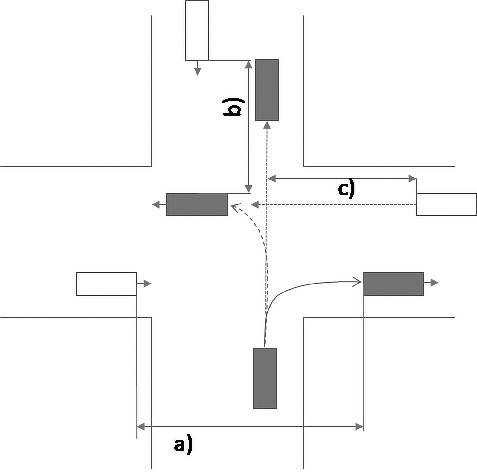
Hinsichtlich der Interaktion mit anderen am Verkehr Teilnehmenden beim Einbiegen und Kreuzen sind folgende Bestehenskriterien zu berücksichtigen (siehe Abbildung 1):
- Abbildung 1:
21Visualisierung der Abstände beim Einbiegen und Kreuzen.
22Fall Buchstabe a: Einzuhaltender Abstand zum nachfolgenden Verkehr beim Einbiegen.
23Fall Buchstabe b: Zusätzlich einzuhaltender Abstand zum Gegenverkehr beim Einbiegen durch den Gegenverkehr.
24Fall Buchstabe c: Beim Kreuzen einzuhaltender Abstand zum bevorrechtigt kreuzenden Verkehr.
25Bestehenskriterien für sicheres Einbiegen und Kreuzen sind aus den Anforderungen der Nummer 5.6.4.7 und 5.6.4.8 der UN-Regelung Nr. 79 abzuleiten.
26Für die Annäherungsgeschwindigkeit (vαρρ) darf die in der Fahrsituation gültige Geschwindigkeitsbeschränkung angesetzt werden.
27Die Anforderungen an die geometrischen Beziehungen zum umlaufenden Verkehr sind vom Spurwechsel auf das Einbiegemanöver entsprechend zu übertragen (Buchstabe a in Abbildung 1).
28Für das Einbiegen über die Gegenfahrbahn hinweg gilt für die Berücksichtigung des entgegenkommenden Verkehrs, dass – zusätzlich zum Abstand zum nachfolgenden Verkehr auf der Zielstraße – sicherzustellen ist, dass die TTC des bevorrechtigten Gegenverkehrs zum berechneten Kollisionspunkt (Schnittpunkt der Fahrpfade) niemals unter 3 Sekunden sinkt (Buchstabe b in Abbildung 1).
29Gleiches gilt beim Kreuzen mit bevorrechtigtem Verkehr (Buchstabe c in Abbildung 1):
30Die TTC des bevorrechtigten Verkehrs zum fiktiven Kollisionspunkt (Schnittpunkt der Fahrpfade) muss mehr als 3 Sekunden betragen.